





What’s cool about our depth cameras ?
LIPS’ depth camera is a special kind of camera empowered with three-dimensional depth perception which is the major differentiator from pure traditional 2D RGB camera. Being the brainchild of the company, this camera hardware paired with sophisticated recognition and tracking software algorithms are key to 3D machine vision application. There're a few different technologies behind how depth camera senses the range each with its own strength and suited for different purposes as follows:
- Time-of-Flight (ToF)
- Stereo RGB
- Structured Light
- Array Camera
Regardless of their technology differences, the high entry barrier constantly exists in fine-tuning and optimizing the optical components to improve the precision from the input side as well as the software DSP algorithms that oftentimes calls for hardware acceleration in GPU through parallel processing. At LIPS, we have it all ready for you, so you can squarely focus on integration with your specific applications or industries.
MIDDLEWARE
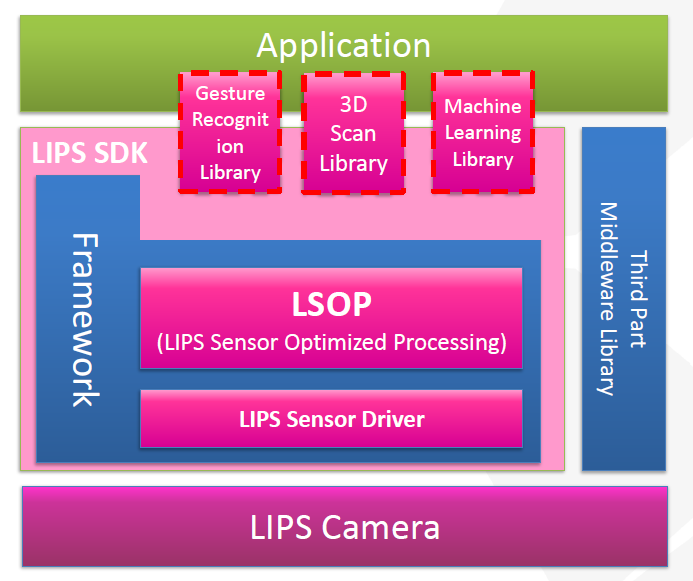
Be empowered by our middleware suite, now!
LIPS depth camera middleware was conceived from its inception to be OpenNI 1.5/2.2 compatible under Windows、Linux、Android and Mac OS with lots of readily implemented extensions dealing with gestures, facial recognitions, context enhancement…etc that can be purchased or tailored for specific purpose. If your applications have been developed on top of OpenNI, with a swap of the OpenNI package with LIPS' one, you are good to explore a whole new 3D experience powered by LIPS!
Core built around acceleration technologies
Our middleware makes use of a slew of leading standards in parallel processing and graphic acceleration to meet the demanding computing power needed in countless deep-learning and image processing algorithms where traditional programming paradigm simply can not sustain without, including:
- OpenCL
- CUDA
- SIMD
- NEON
- OpenMP